

自动驾驶四大核心技术,分别是环境感知、精确定位、路径规划、线控执行。环境感知是其中被研究最多的部分,依托于摄像头、激光雷达、毫米波雷达的环境感知技术逐渐趋于成熟,并逐步量产落地。
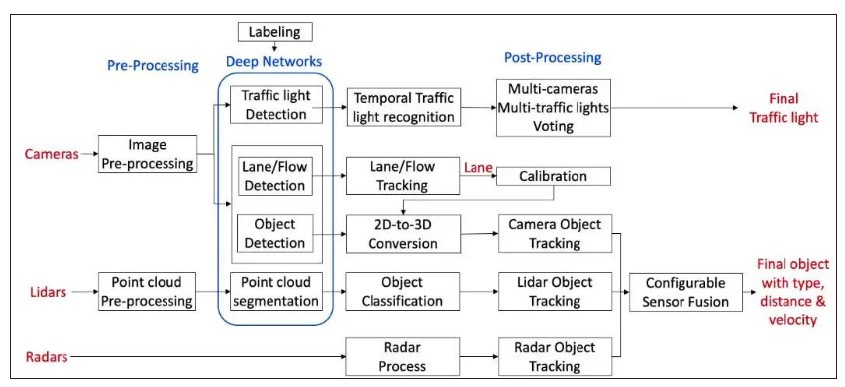
自动驾驶环境感知框架图
在感觉阶段,车辆以光学相机、激光雷达、毫米波雷达等采集周围环境数据,以 GPS(Global Positioning System)、IMU(Inertial Measurement Unit)、速度计等采集自身行驶状态信息,将真实世界的视觉、物理、事件等信息转变成数字信号,传送至作为“驾驶脑”的智能算法中心。在感知阶段,智能算法中心对采集到的信息进行分析、组织和解释,具体表征为对行驶环境中的目标或者障碍物进行识别、分割和检测,获取其类别、尺寸、几何形状、行驶方向、位置等物理和语义信息。在认知阶段,智能算法中心基于目标(障碍物)的表现和状态进行分析和推理,透过表象解析其逻辑关联,做出准确的判断(包括目标行为、安全区域、路径规划等),使“驾驶脑”具备同大脑相媲美的决策能力,继而指挥控制系统执行具体的驾驶操作。
智能网联汽车的环境感知传感器主要包括超声波传感器、毫米波雷达、激光雷达、视觉传感器等。
(1)超声波传感器。超声波传感器主要应用于短距离探测物体,不受光照影响,但测量精度受测量物体表面形状、材质的影响较大。在智能网联汽车上主要用于自动辅助泊车,结构简单、体积小、成本低。
(2)毫米波雷达。毫米波雷达是智能网联汽车应用最广泛,也是最重要的传感器之一,主要包括用于短程的 24GHz 毫米波雷达和中远程的 77GHz 毫米波雷达。毫米波雷达可以准确检测前方障碍物的距离和速度信息,抗干扰能力强,具备较强的穿透雾、烟、灰尘的能力,受天气和光线的影响小,体积小;缺点是行人的反射波较弱,难以探测。
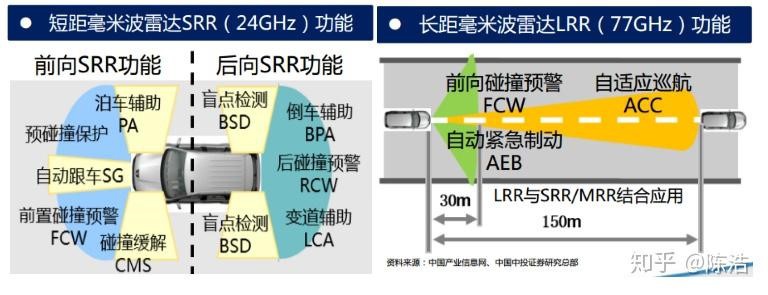
短距毫米波雷达的应用图
(3)激光雷达。激光雷达是无人驾驶汽车的必备传感器,根据自动驾驶级别,可以配备不同线束的激光雷达。激光雷达分单线束和多线束激光雷达,多线束激光雷达通过点云来建立周边环境的 3D 模型,可以检测出包括车辆、行人、树木、路沿等细节。激光雷达能够直接获取物体的三维距离信息,测量精度高,对光照环境变化不敏感,抗干扰能力强,是智能网联汽车发展的最佳技术方向,但是成本较高。
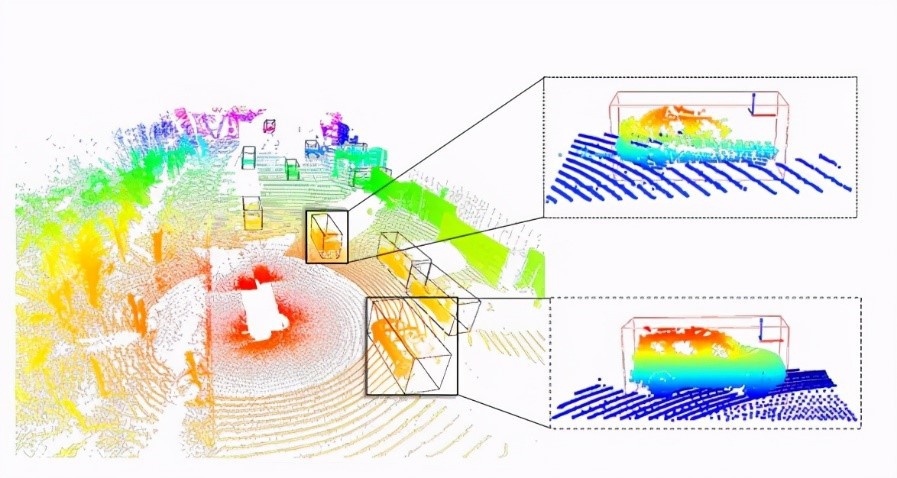
三维目标检测效果图
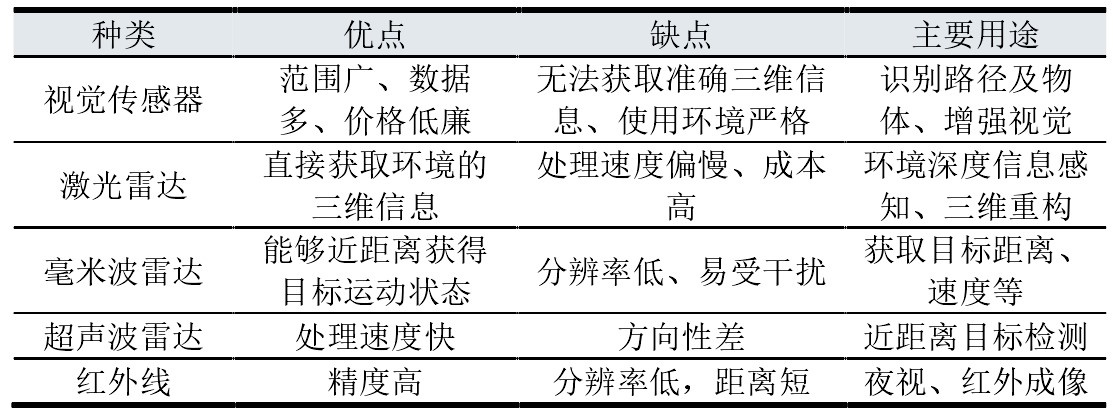
(4)视觉传感器。视觉传感器包括单目摄像头、双目摄像头、三目摄像头和环视摄像头。单目摄像头、双目摄像头、三目摄像头主要应用于中远距离场景,能识别清晰的车道线、交通标识、障碍物、行人等,但对光照、天气等条件很敏感,而且需要复杂的算法支持,对处理器的要求也比较高;环视摄像头主要应用于短距离场景,可识别障碍物,同样对光照、天气等外在条件很敏感。不同传感器的感知范围不同,它们均有各自的优点和局限性,现在发展的趋势是通过传感器信息融合技术,弥补单个传感器的缺陷,提高整个智能驾驶系统的安全性和可靠性。
常用传感器对比
近年来,随着硬件算力的提升和人工智能的兴起,大量基于深度学习理论的环境感知算法被提出,其以端到端的预测方式代替分段式处理,以数据驱动取代人工建模,在精度、速率、鲁棒性等方面均超过了传统方法。作为核心的神经网络通过模拟“突触连接”可拟合更加复杂、模糊的问题,学习到的特征更能反映数据的本质,具有优秀的柔性、智能性和自学习性,为三维感知的研究提供了新的方法和思路。
CONTENT END


